junk-busters
This project is solving the SpaceBot Stereo Vision challenge. Description
Welcome,
we are
![]()
The Problem: Space Junk
The increasing amount of space junk [1] is a human made problem. We came up with the idea to use the NASA SPHERES platform [2] for developing autonomous satellites with stereo vision cameras to actively remove space junk.

Figure 1 Illustration of Space Junk by David Shikomba
Our Solution: Paired SPHERES
Our vision consists of two or more paired SPHERES: An observatory unit and one or more operational units. They can detect space debris and remove it in a safely manner, for example by using an ion thruster or by attaching a chemical thruster to old satellites.

Figure 2 SPHERES with VERTIGO extension for stereo vision [3]
Utilizing Stereo Vision
Having our idea in mind we used a real stereo camera setup (IDS uEye, see Figure 4), our laptop web-cams and virtual demos to develop our implementation.
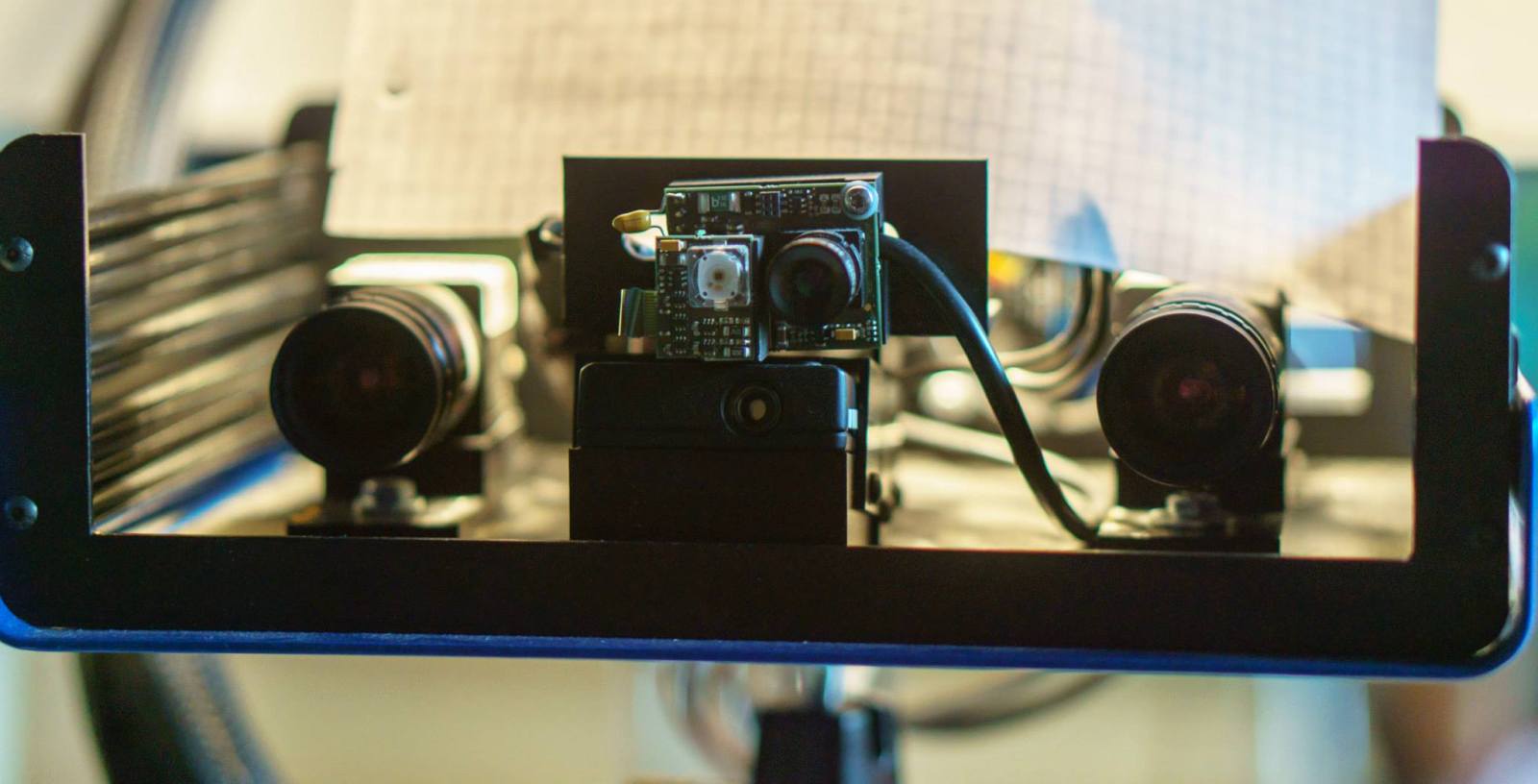 Figure 4 Front view of our stereo sensor
Figure 4 Front view of our stereo sensor
Figure 5 shows our live demo setup with some calibration targets. The magenta ball simulates some piece of space junk and the green ball is an approaching junk buster unit. The whole scene is seen by our stereo sensor which is used to reconstruct the 3D scene.

Figure 5 Demo Setup of our Camera Environment
Technical Implementation
We created a set of software to demonstrate our vision and concept. There are two main parts: Image processing / 3D reconstruction and the data interpretation plus visualization.
OpenCV Image Processing and 3D reconstruction
We used the OpenCV framework to solve the following task of processing stereo vision images [4] in real time:
- o Stereo Image Acquisition
- o Camera Calibration using a checkerboard calibration target
- o Color Segmentation and Binarization
- o Object Tracking: Colored balls and taught patterns
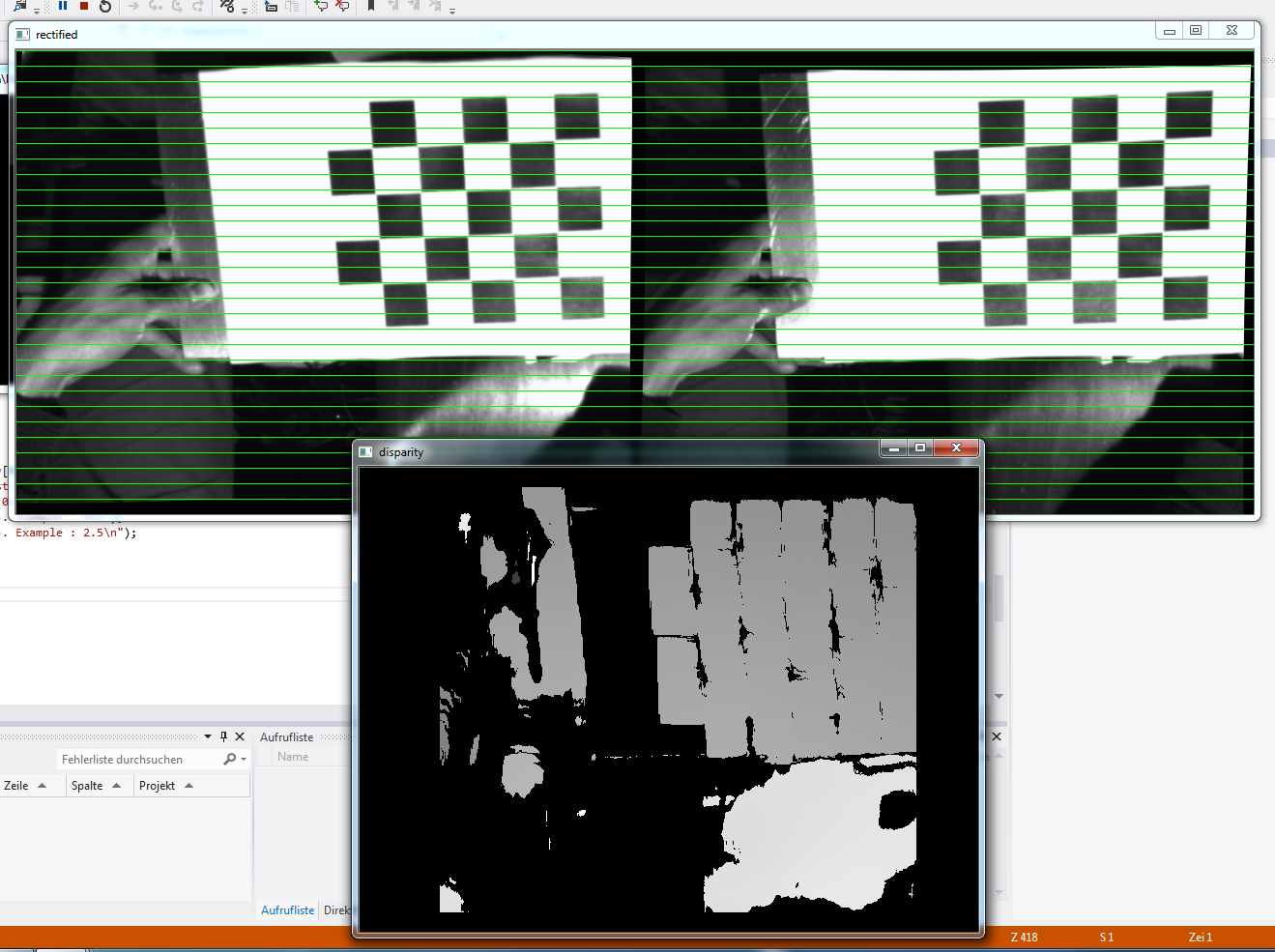
Figure 6 Stereo Camera Calibration
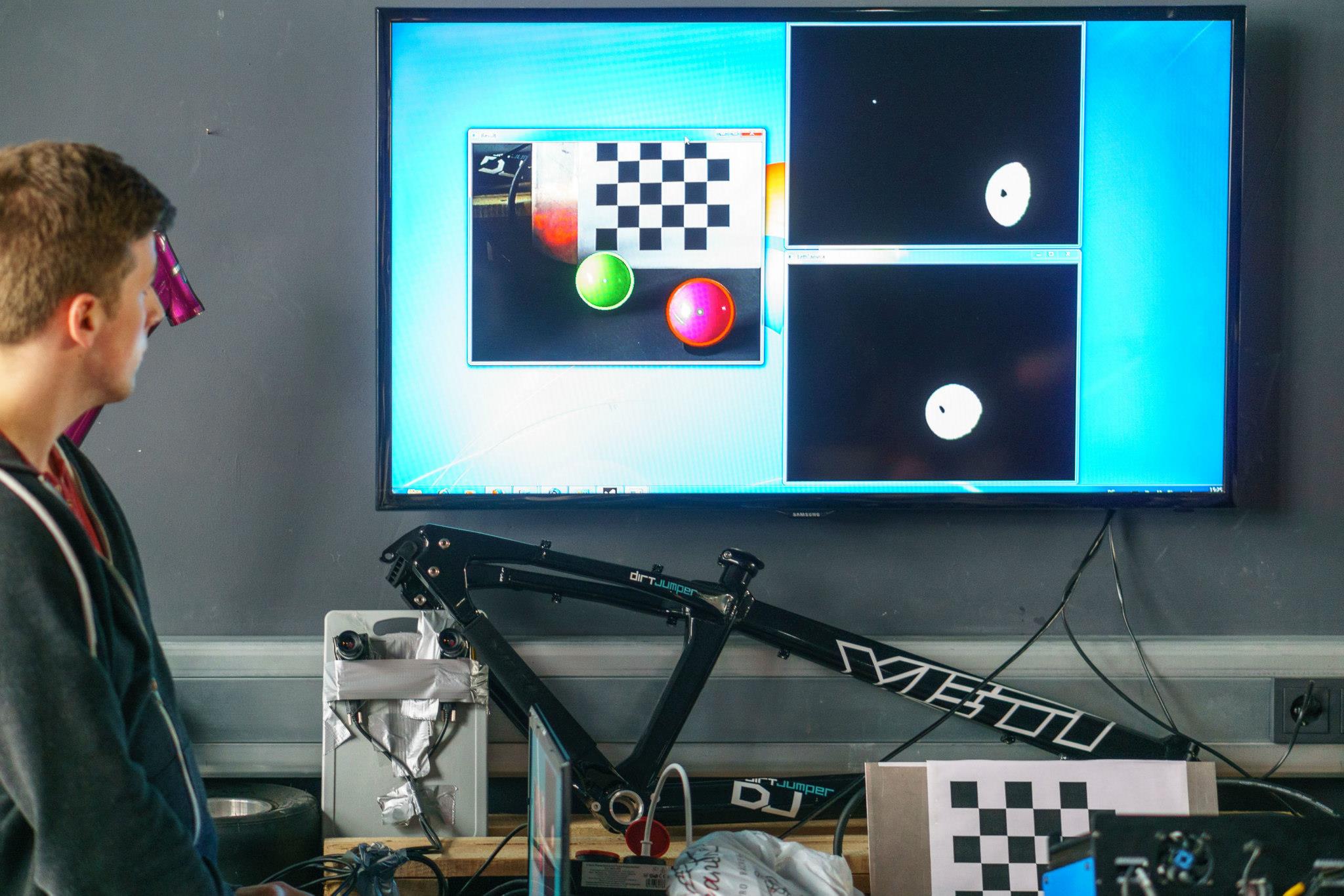
Figure 7 Live Object Tracking
CONCEPT DEMO: Data Processing Data and Visualization
In order to demonstrate our vision of the Junk Buster SpaceBots we created an interactive live demo with exemplary space trajectories. Features:
- o Data Processing: Numeric calculation of distance, speed and acceleration
- o Visualization: Movements of the objects in 3D
- o Alarm features: Collision alarm between all objects
- o Impact prediction: Time to impact with alarm levels
- o Interactivity: The operational Junk Buster follows the mouse. Scrolling edits the depth value set.
- o Exemplary Space Trajectories: Generating data to animate the demo
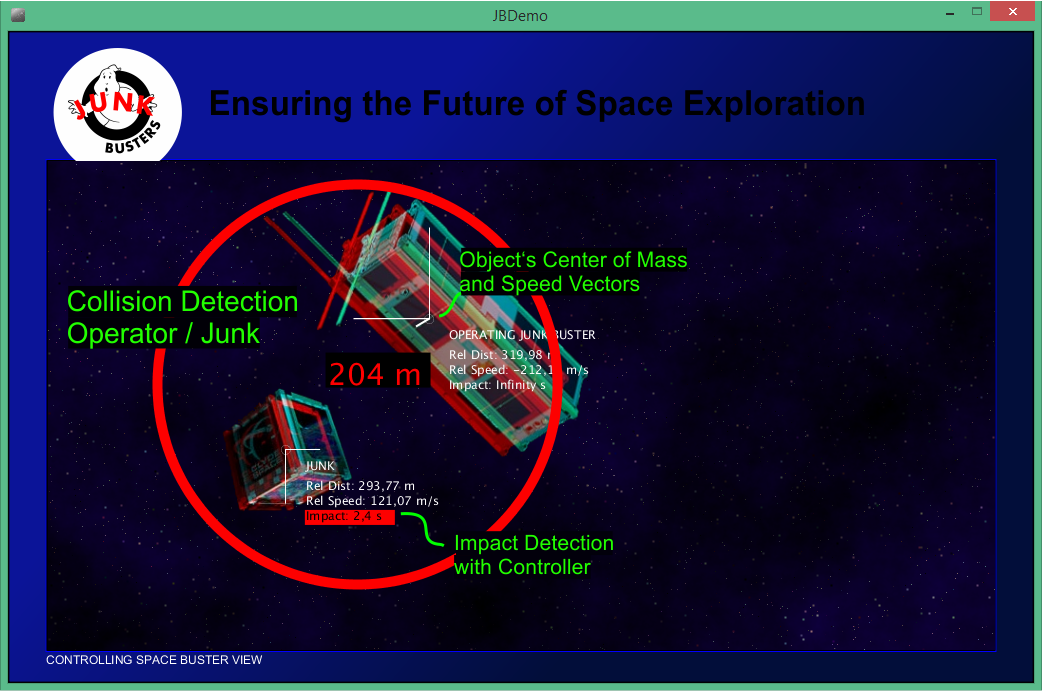 Figure 8 Dashboard User Interface with Annotations
Figure 8 Dashboard User Interface with Annotations
MATLAB Trials
The original plan was to code a proof of concept in MATLAB by using different toolboxes. But then reality kicked in and we experienced minor issues. So we had a NOGO decision for MATLAB and switched to coding in C++ using OpenCV. All the initial space trajectory processing was developed in MATLAB and afterwards ported to C and Java (Processing).
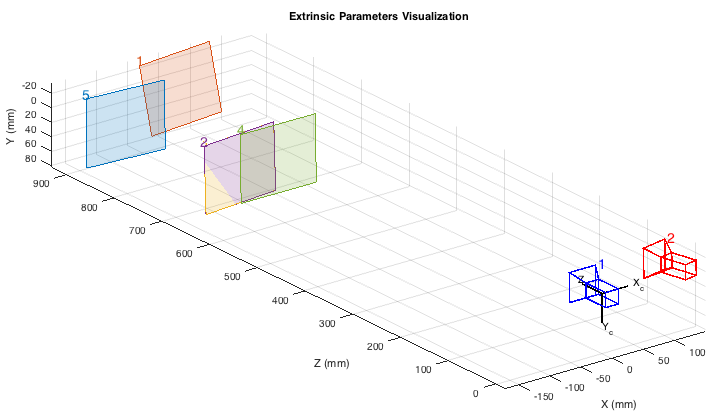
Figure 9 Results of Stereo Camera Calibration with MATLAB
Conclusion: Saving the Future of Space Exploration
By using an optical method of debris detection on board of the SpaceBots, they can track and remove objects which cannot be tracked with the needed accuracy by existing ground based tracking systems. We utilize the stereo data to deliver 3D information for approaching space debris. With the existing NASA SPHERE program there is an opportunity of testing our systems which than can be used for the greater purpose of removing space junk.
We think it's time for starting to save the future of space exploration now!
Acknowledgments
Thanks to the members of staff at Lab75, our host at Space Apps Challenge 2015 at Frankfurt. We also thank Prof. Dr. Stephan Neser for supporting us with the stereo camera equipment and MATLAB advice.
References
[1] "Orbital Debris FAQ: How many orbital debris are currently in Earth orbit?", NASA, March 2012.
[2] SPHERES Satellites, NASA, August 2013.
[3] The Visual Estimation for Relative Tracking and Inspection of Generic Objects (VERTIGO) program, MIT Space Systems Laboratory.
[4] Camera Calibration and 3D Reconstruction, OpenCV, February 2015.
Project Data
About the Authors
Eduardo Cruz
Software Engineer
Tim Elberfeld
Student of Photonics and Computer Vision
Marcel Kaufmann
Student of Photonics and Computer Vision
Sebastian Schleemilch
Student of Electronic and Medical Engineering
Philipp Schneider
Student of Photonics and Computer Vision

From left to right: Philipp, Tim, Astro-Jared, Marcel, Eduardo, Sebastian.
JUNK-BUSTERS Team with Astro-Jared at Lab75, Frankfurt on 12. April 2015.
This project was worked on during the NASA Space Apps Challenge 2015 (11.-12.04.2015).
Last updated: 19.04.2015.
Project Information
License: MIT license (MIT)
Source Code/Project URL: https://github.com/mace301089/NASASpaceAppsChallenge




