-
Hashtags:
#robotics, #spacebot, #advanced
Contact:
Tags:
Hardware
Background
Zero Robotics is a robotics challenge where students have the opportunity to utilize the International Space Station as a laboratory to test programming codes from the ground using Synchronized, Position, Hold, Engage, Reorient Experimental Satellites (SPHERES). The program, led by MIT, is aimed at engaging students in innovative, complementary learning opportunities, as well as increasing student interest in science, technology, engineering, and mathematics. NASA joined the Defense Advanced Research Projects Agency, Massachusetts Institute of Technology (MIT), the European Space Agency, the Center for the Advancement of Science in Space and IT consulting firm Appirio in hosting the live microgravity competition. NASA’s SPHERES program – Synchronized Position Hold, Engage, Reorient, Experimental Satellites -- consist of three free flying vehicles inside the International Space Station identifiable by their shell colors of Red, Blue, and Orange. Initially the SPHERES were designed for testing of control theory algorithms. The Satellites are about the size and mass of a bowling ball and use cold gas thrusters (CO2) to propel the vehicles around a fixed experimental volume. The SPHERES program currently operates out of the Japanese Experimental Module (JEM) inside Station. SPHERES uses ultrasound beacons as a metrology system to identify its position in conjunction with accelerometers, and gyroscopes.
Challenge
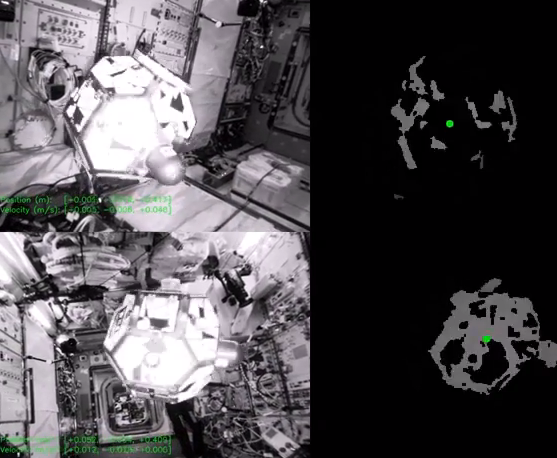
SpaceBots on the International Space Station see in stereo vision. We have data to prove it – based on the NASA and MIT Zero Robotics programming competition that starts online with teams programming a space bot (called SPHERES) to solve problems onboard the International Space Station. An astronaut conducts the competition in zero g with a live broadcast for viewers back home on planet Earth. We want you to apply “stereo vision” data from space to help us see the world in new ways. Use the data output from this challenge to create a new point of view for how we see the world. You can create a data dashboard, visualization, infographic, app, software tools, or your own Earth-based robot.
Considerations
- Apply stereo vision data from space in new ways.
- Use the data output from this challenge to create a data dashboard, visualization, infographic, app, software tools, or your own Earth-based robot.
- You choose what data to use and how to apply it for your own creative output.
Sample Resources(Participants do not have to use these resources, and NASA in no way endorses any particular entity listed).
- SPHEREs point of view of Collaborative Data Acquisition: https://www.youtube.com/watch?v=H3waCvk4ZY8
- Space Station Astronaut point of view of Collaborative Data Acquisition: https://www.youtube.com/watch?v=MCZgTB4TLkY
- Video files for Space Systems Lab experiments: https://www.youtube.com/user/MITSpaceSystemsLab/videos
- International Space Station SPHERES-ZeroRobotics experiment: http://www.nasa.gov/mission_pages/station/research/experiments/690.html
- NASA SPHERES program: http://www.nasa.gov/spheres
- NASA SPHERES Mission overview: http://www.nasa.gov/spheres
- Robotic sensors: http://www.nasa.gov/centers/johnson/techtransfer/technology/sensors
- Passive and active sensors: http://www.nasa.gov/directorates/heo/scan/communications/outreach/funfacts/txt_passive_active
-
The following projects are solving this challenge:
-
Black Box for Astronaut with Broadcast
Details will come trough us soon. Visit Project
-
Marvin - A Martian Tour Guide
The Curiosity Rover has sent back terabytes of data so far. NASA has released stunning images received directly from Mars for public viewing. Our project is to use these images to provide for a VR experience to the general public. We develop an app that can be used in conjunction with the openly ... Visit Project
-
Galaxy Cruise
Galaxy Cruise primarily recreates an atmosphere based on certain inputs from NASA. We figured that if this can be done for NASA, this can be done for any set of inputs to recreate different atmoshpheres. The applicability and implementation of the project can be across different industries such a... Visit Project
-
JUNK BUSTERS
Welcome, we are  #The Problem: Space Junk *** The increasing amount of space junk [1] is a human made problem. We came up with the idea to use the [NAS... Visit Project
-
SPHERES For Everybody
We believe in the wonderful things space have undercover. Sadly, most of the people aren't aware of the amazing things that NASA, the most important space exploration organization on Earth, is collecting. We will create an application that will function as a guide for people of all ages to un... Visit Project
-
Ultrasonic Stereo-vision Platform
The goal of this project is to create and test a software agent that can that can approximate a real-time ultrasonic map of an environment, and runs on standard hobbyist microcontrollers and microprocessors. The focus of this project is on simplicity and efficiency over technical prowess. Visit Project
-
Death Star in SPACE
I love Star Wars, and who doesn't... There have been proposals to build a Death Star in Space before. Just check out White House website at [http://goo.gl/Q6WDB](http://goo.gl/Q6WDB). They estimated the cost at $850 Quadrillion for a full scale (120 km / 74.5 mile) diameter system; but I know we ... Visit Project
-
Stereo vision experiment review tool
#Summary We aim to make it easier for scientists to review the SPHERES experiment videos, specifically regarding the quality and quantity of feature matches between the left and right views of the goggles. The primary aim is to expose a given point in the video timeline and allow for efficient... Visit Project
-
-
Welcome to the collaborative hackpad! You can use this open document to collaborate with others, self organize, or share important data. Please keep in mind that this document is community created and any views, opinions, or links do not reflect an official position of the Space Apps Challenge, NASA, or any of our partners.
Building a team or looking for one to join? Feel free to create a Matchmaking section at the bottom of the document to help in gathering great minds together!
If you want to edit this Hackpad, or have trouble viewing it, please create an account at spaceapps2015.hackpad.com
SpaceBot Stereo Vision Hackpad: https://spaceapps2015.hackpad.com/SGdrd03Pya9